Cours Réseaux de terrain en PDF (Intermédiaire)
3ᵉ partie. Analyse technique des bus industriels (RS-485, Modbus, Profibus, Jbus, CAN) centrée sur les couches physique et liaison, avec exemples de trames et indications de diagnostic. Le document examine les bus de terrain comme une implémentation optimisée des couches basse du modèle OSI et fournit des méthodes pratiques pour la mise en œuvre et le dépannage.
Note de l'auteur : Ce support est conçu pour accompagner les travaux dirigés en laboratoire, facilitant la transition entre la théorie des bus et le diagnostic réel sur automate.
🎯 Ce que vous allez apprendre
RS-485 : caractéristiques électriques et topologie
Caractéristiques différentielles, modes 2 fils (half duplex) et 4 fils (full duplex), limites pratiques de distance et débit. Objectif : dimensionner une topologie multipoint, appliquer terminaison et polarisation, et anticiper incompatibilités entre équipements lors de mises en service.
Modbus : framing et diagnostic
Modèle maître/esclave et variantes (liaison série, Modbus TCP/IP, Modbus Plus). Analyse de trames et vérification du CRC. Compétence visée : décodage de trames et identification des erreurs liées au format ou au transport.
Profibus-DP : arbitration et configuration
Fonctionnement multimaître, mécanisme du jeton et débits typiques (jusqu'à 12 Mbit/s) sur paire torsadée ou fibre. Savoir configurer un segment, dimensionner les longueurs et évaluer le nombre maximal de stations selon les spécifications.
Bus CAN : couches physique et liaison
Codage NRZ, notion de bit dominant/récessif, formats de trame (2.0A, 2.0B) et types (data, remote, error). Arbitrage bit à bit non destructif et évaluation des priorités par identificateur pour diagnostiquer des conflits temps réel.
Intégrité des données et stratégies d'accès
Calculs CRC 16 bits, stratégies CSMA/CR et méthodes de résolution de collisions sur CAN. Application pratique : contrôler l'intégrité des trames et diagnostiquer pertes ou conflits d'accès en atelier.
Jbus et variantes dans les automates
Repérage de Jbus et variantes de Modbus dans les automates programmables, critères de choix selon contraintes temporelles et topologie, et impact sur la conception d'interfaces.
Travaux Dirigés et Exercices
Ensemble de TD conçu pour mettre en pratique le diagnostic et la configuration des bus de terrain. Les séances proposent des travaux mesurables, jeux de données réels et critères d'évaluation permettant de vérifier les acquis en laboratoire. Chaque exercice comporte des consignes, un protocole de test et des éléments de validation pour faciliter le débriefing pédagogique.
- Analyse de trames Modbus RTU : décodage d'adresses, fonctions et CRC, identification d'erreurs de format et de synchronisation.
- Configuration de nœuds CAN : réglage des vitesses, terminaison, diagnostic d'arbitrage et tests d'occupation du bus.
- Diagnostic de bus Profibus-DP : recherche de défauts de câblage, analyse de pertes de jeton et optimisation des paramètres de segment.
- Exercices de polarisation et terminaison RS-485 : mesures pratiques, mise en conformité et résolution de réflexions.
- Jeux de données pour laboratoire : captures de trames, scénarios d'erreur et propositions de correction avec critères de réussite.
Travaux Dirigés : Analyse et Diagnostic
Les TD offrent des fiches guidées pour l'observation et l'interprétation des phénomènes électriques et protocolaire. Chaque session inclut un énoncé, des étapes de validation et une correction commentée destinée aux formateurs. Mots-clés pédagogiques ciblés : TD réseaux industriels et exercices corrigés bus de terrain ; un tutoriel protocole industriel PDF accompagne les corrections pour usage en salle de TP ou en formation continue.
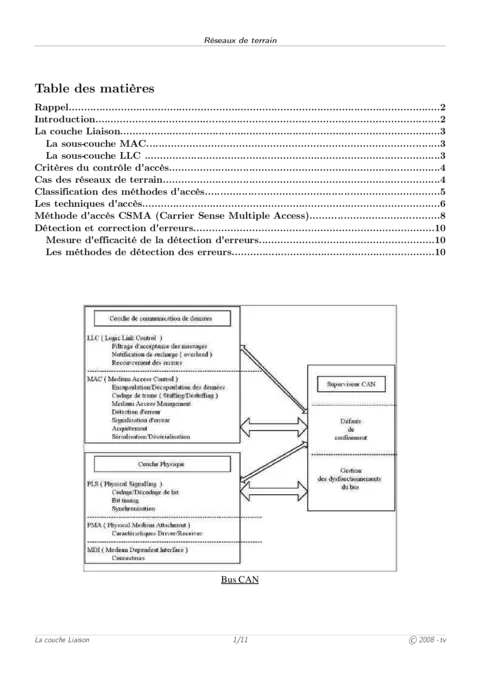
Les bus de terrain et le modèle OSI
Les bus industriels implémentent prioritairement les deux couches basses du modèle OSI : physique et liaison. Cette implémentation optimise les échanges pour des contraintes industrielles (latence, robustesse électromagnétique, topologie multipoint) et réduit la complexité des couches supérieures.
Modèle OSI simplifié : dans les environnements industriels, la pile protocolaire se réduit souvent à des fonctions strictes de synchronisation, adressage et contrôle d'accès, ce qui facilite les diagnostics. Comprendre cette simplification aide à distinguer une anomalie électrique d'un défaut de protocole de liaison et oriente les mesures correctives (mesures électriques, reconfiguration de la topologie, vérification des trames).
Protocoles industriels et automates (API)
Les automates programmables (API) exploitent les protocoles de terrain pour accéder à registres, entrées/sorties et paramètres opérationnels. L'intégration impose des règles de mapping d'adresses, des garanties de timing et des politiques de redondance adaptées aux exigences temps réel. Ce lien facilite le diagnostic : interprétation des registres, validation des cycles d'échange et détection des latences induites par la topologie ou la configuration du segment.
💡 Pourquoi choisir ce cours ?
Approche technique centrée sur les couches physique et liaison, avec détails opérationnels utiles en intervention (CRC, câblage, connecteurs DB9, méthodes d'accès). Rédigé par Thierry VAIRA et fondé sur les spécifications officielles des standards RS-485, Modbus, Profibus et CAN, le support fournit des indications pratiques de diagnostic et des comparaisons protocolaires concrètes pour la mise en œuvre industrielle.
👤 À qui s'adresse ce cours ?
- Public cible : techniciens et ingénieurs en automatisme et maintenance industrielle, intégrateurs d'API et développeurs d'interfaces d'acquisition souhaitant approfondir les bus de terrain et leurs contraintes électromagnétiques.
- Prérequis : notions de communication série (UART/RS), compréhension du modèle OSI (couches physique et liaison), bases en binaire/CRC et familiarité avec les automates programmables et le câblage industriel.
❓ Foire Aux Questions (FAQ)
Comment la RS-485 améliore-t-elle la tolérance aux perturbations ? La transmission différentielle sur paire torsadée réduit les interférences communes et autorise des liaisons sur de longues distances selon le débit. Des recommandations de terminaison et de polarisation limitent les réflexions et assurent la robustesse face aux perturbations.
Quel est le principe d'arbitrage sur le bus CAN et comment est définie la priorité ? Le CAN utilise un arbitrage bit à bit non destructif via CSMA/CR : chaque nœud émet et surveille le bus; s'il détecte un bit dominant alors qu'il a émis un récessif, il cesse d'émettre. La priorité résulte de l'identificateur binaire (valeur la plus faible = priorité la plus élevée).