Cours Bus CAN en PDF (Intermédiaire)
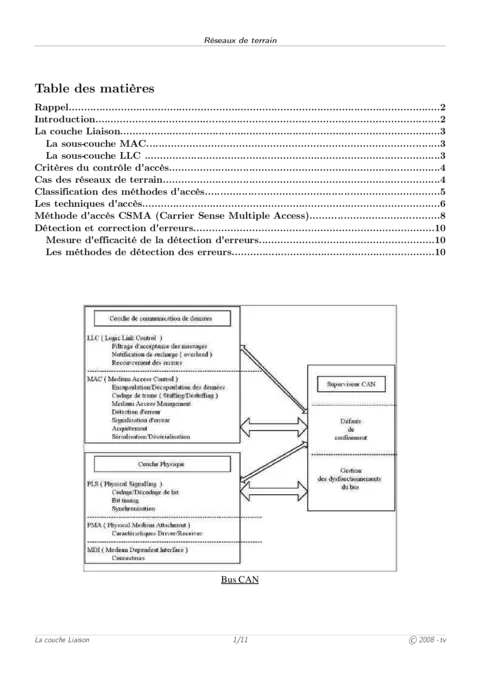
Bus CAN (Controller Area Network) : Ce qu'il faut savoir. Il s'agit d'un protocole série normalisé (ISO 11898, ISO 11519) conçu pour la communication temps réel entre nœuds embarqués ; il couvre les couches Physique et Liaison du modèle OSI et généralités et repose sur des trames structurées (CAN 2.0A/2.0B) et un arbitrage bit à bit non destructif. Développé par Robert Bosch GmbH dans les années 80, CAN est devenu le standard industriel pour la communication embarquée. Sa robustesse, la gestion d'erreurs intégrée et la possibilité d'un fonctionnement multi‑maître le rendent adapté à l'automobile et aux réseaux de terrain industriels. Ce document PDF gratuit rassemble définitions, trames, gestion des erreurs et exercices pratiques pour analyser et concevoir des segments CAN fiables.
« Le Controller Area Network a transformé l'architecture des véhicules en permettant une communication distribuée, robuste et déterministe entre calculateurs embarqués — un élément clé pour la fiabilité et la sécurité des systèmes automobiles. »
Ce que vous allez apprendre dans ce PDF
- Comprendre le codage et le synchronisme : NRZ, bit‑timing et effets de la charge.
- Analyser et décoder les trames (SOF, arbitrage, IDE, CRC, ACK, EOF) sur des captures réelles.
- Maîtriser le bit‑stuffing, le calcul CRC et l'interprétation des trames d'erreur pour diagnostiquer un réseau.
- Évaluer contraintes physiques : terminaison, transceiver, longueur maximale et impact sur la latence.
- Appliquer des méthodes de test et des exercices pratiques pour valider une architecture réseau et son intégration.
Objectifs pédagogiques du cours
- Architecture et normes — situer le protocole dans le modèle OSI, connaître les références ISO 11898 / 11519 et distinguer les formats d'identificateur 11 bits (2.0A) et 29 bits (2.0B) pour justifier un choix selon priorité et capacité réseau.
- Structure des trames — décoder les champs (SOF, arbitrage, IDE, contrôle, CRC, ACK, EOF) et identifier les conditions d'acquittement ou d'échec sur une capture.
- Arbitrage et priorités — analyser l'arbitrage non destructif basé sur bits dominants/récessifs et évaluer les impacts de contention sur la latence.
- Détection et confinement d'erreurs — interpréter CRC, bit‑stuffing, trames d'erreur et états d'erreur des nœuds pour proposer des stratégies de récupération ou d'isolement d'un équipement défectueux.
- Couche physique — évaluer l'effet de la charge capacitive, des terminaisons, du débit et du codage sur la longueur maximale et la synchronisation, et sélectionner un transceiver adapté.
- Exercices et études de cas — appliquer les concepts via des exercices (bit‑stuffing, calcul CRC, analyse d'arbitrage, gestion d'overload) pour renforcer l'analyse de captures et la validation d'un réseau embarqué.
Le bus CAN dans les systèmes embarqués
Le protocole assure le multiplexage des signaux entre calculateurs et capteurs dans les véhicules, réduisant le câblage et centralisant l'échange de données temps réel. Son utilisation s'étend des calculateurs moteur aux unités de confort, en passant par les capteurs de sécurité. Le document décrit les contraintes pratiques de déploiement : topologies courantes, enjeux de terminaison et d'adaptation électrique, ainsi que méthodes de test pour valider l'intégration sur un segment multiplexé.
Comparaison avec les autres bus de terrain
- LIN — bus simple et économique pour sous‑ensembles (capteurs/actionneurs), adapté aux faibles débits et architectures maître‑esclave ; complémentaire au multiplexage centralisé, mais moins robuste en temps réel.
- FlexRay — conçu pour architectures critiques nécessitant déterminisme et synchronisation stricte ; offre des performances supérieures pour certaines fonctions de sécurité, au prix d'une complexité et d'un coût accrus.
- Rôle du CAN — compromis fréquent entre robustesse, coût et latence pour les systèmes automobiles : adapté à la plupart des échanges temps réel non critiques tout en coexistant avec LIN ou FlexRay selon les besoins.
Tableau comparatif : CAN vs LIN vs FlexRay
Comparatif technique des protocoles de bus de terrain
| Bus | Débit typique | Usage principal |
|---|---|---|
| CAN (classique) | Jusqu'à 1 Mbit/s (CAN‑FD : débits plus élevés) | Commutation de capteurs/actuateurs, communications ECU, diagnostics |
| LIN | Jusqu'à ~20 kbit/s | Sous‑ensembles non critiques : confort, capteurs simples |
| FlexRay | Jusqu'à 10 Mbit/s | Fonctions critiques nécessitant déterminisme et synchronisation |
Historique et origine du protocole CAN
Le protocole a été développé par Robert Bosch GmbH dans les années 80 pour répondre au besoin d'une communication robuste et économique entre calculateurs embarqués dans l'automobile. Bosch a participé activement à la définition des premières spécifications techniques et à la promotion du protocole, contribuant ainsi à sa normalisation ultérieure (ISO 11898). Le texte présente les jalons techniques et normatifs pertinents et situe son évolution vers des variantes comme CAN‑FD, utiles pour des besoins de débit accrus.
Le multiplexage et le bus CAN
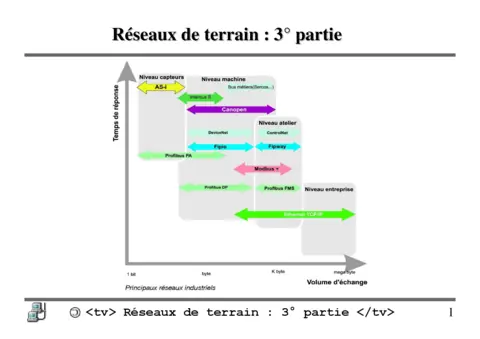
Le multiplexage réduit le nombre de liaisons physiques en transportant plusieurs signaux logiques sur un même support partagé. Le protocole CAN implémente ce principe au niveau signal en permettant à de nombreux nœuds d'échanger des trames arbitrees sur une paire différentielle, ce qui diminue le câblage et simplifie l'architecture électrique. Ce tutoriel bus CAN explique comment le multiplexage automobile se traduit dans la conception des messages, la priorisation par identificateur et la planification des trames CAN pour garantir latence et robustesse.
💡 Pourquoi choisir ce cours ?
Document rédigé pour un public technique, avec un équilibre entre description normative (références ISO) et mises en pratique pédagogiques. La méthode combine explications structurées et exercices d'analyse pour faciliter l'acquisition des gestes professionnels nécessaires au diagnostic et au dimensionnement d'un segment CAN. Ce tutoriel offre une progression claire, des exemples de captures et des exercices pour travailler le protocole automobile et la conception d'une architecture réseau.
👤 À qui s'adresse ce cours ?
- Public cible : techniciens et étudiants en systèmes embarqués, BTS/TS en électronique ou informatique industrielle, intégrateurs et ingénieurs débutants intervenant sur réseaux automobiles et industriels.
- Prérequis : notions de logique numérique, communication série, connaissance du modèle OSI et protocole TCP/IP et notions d'électronique (tensions, masse, transceiver).
❓ Foire Aux Questions (FAQ)
Comment l'arbitrage bit à bit garantit‑il l'accès au bus sans collision ?
L'arbitrage repose sur la hiérarchie dominant/récessif : chaque émetteur surveille l'état du bus et cesse d'émettre lorsqu'il détecte une différence entre le bit transmis et le bit observé. Le message dont l'identificateur présente les bits dominants en priorité persiste, permettant une détermination immédiate de l'émetteur gagnant sans corruption des trames en cours.
Auteur : Thierry VAIRA — contenu appuyé par des références normatives et des exemples concrets issus de l'automobile, visant à garantir une approche méthodique et vérifiable pour l'analyse et le déploiement d'un réseau CAN fiable.