Cours La couche Liaison en PDF (Intermédiaire)
Téléchargez ce cours PDF sur la couche Liaison pour maîtriser les sous‑couches MAC et LLC, les méthodes d'accès et la détection d'erreurs.
Objectifs d'apprentissage
- Rôle et découpage de la couche Liaison — responsabilités fonctionnelles : mise en trame, synchronisation, contrôle de flux, établissement et libération de connexions ; distinction des fonctions MAC vs LLC et articulation avec la couche Physique.
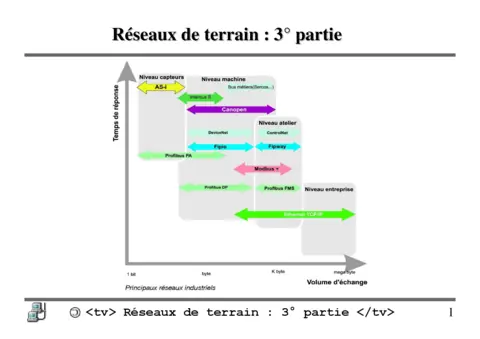
- Sous‑couche MAC et méthodes d'accès — mécanismes d'accès au support (maître unique, pair‑à‑pair, registre à décalage, multi‑maître/jeton), impacts sur déterminisme et équité, et comparaison d'algorithmes d'arbitrage pour usages temps réel (ex. CAN vs Ethernet).
- Sous‑couche LLC et types de service (type 1/2/3) — services IEEE 802.2 : datagramme non acquitté, service avec connexion numérotée, datagramme acquitté pour l'industriel ; critères de choix selon ordre, acquittement et contrôle de flux.
- Accès multiple et arbitrage — principes CSMA/CD, CSMA/CR, arbitrage bitwise du bus CAN et préservation de la priorité des messages.
- Détection et correction d'erreurs — distance de Hamming, taux d'erreur résiduel, et pratique du CRC avec exemples de polynômes (CRC‑16, CRC CCITT V41,
CRC-32) et description succincte de la pseudo‑division.
La couche Liaison dans le modèle OSI
Située au niveau 2 du modèle OSI, la couche Liaison est le pivot entre le support physique et le routage logique.
La couche Liaison (niveau 2) assure l'interface directe avec la couche Physique (niveau 1) pour fournir des services de transfert de trames, contrôle d'accès au média et gestion d'erreurs locaux. Dans les environnements industriels, l'alignement entre implémentation MAC/LLC et contraintes temps réel conditionne la robustesse, la sécurité et la disponibilité opérationnelle.
| Protocole | Type d'accès | Détection d'erreur | Usage industriel |
|---|---|---|---|
| Ethernet | CSMA/CD (historique), commutation moderne | CRC-32 dans trame Ethernet |
Réseaux locaux industriels, interconnexion d'automates |
| CAN | Arbitrage bitwise multi‑maître (non destructif) | CRC spécifique CAN | Automobile, bus de terrain temps réel |
| FIP | Accès déterministe (selon implémentation) | Somme de contrôle/CRC selon profil | Automatisation industrielle, bus de terrain |
Structure et format des trames
Structure d'une trame Ethernet
- Préambule — séquence de synchronisation pour le contrôle d'horloge avant la délimitation de la trame.
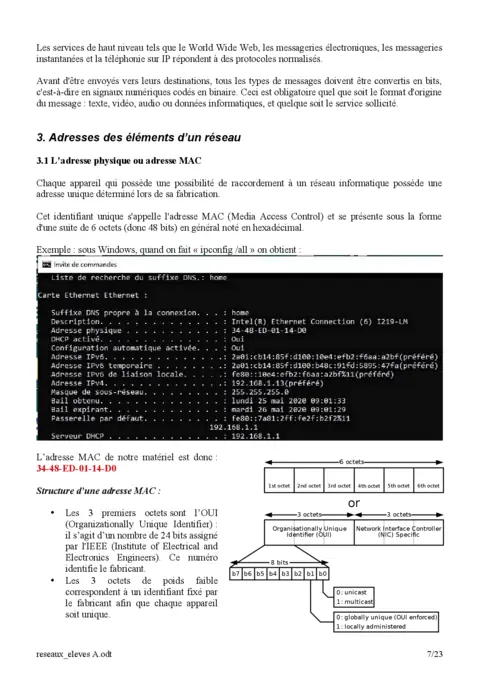
- Adresses MAC — adresse destination et adresse source (48 bits chacune) pour l'identification de nœuds au niveau liaison.
- EtherType / Longueur — champ indiquant le protocole de couche supérieure ou la longueur de la charge utile (utilisé par IEEE 802.2).
- Données (Charge utile) — information transmise (taille variable selon contraintes du protocole couche liaison et du contrôle d'accès au média).
- FCS (Frame Check Sequence) — CRC (ex.
CRC-32) pour la détection d'erreurs en réception.
Les trames Ethernet illustrent le protocole couche liaison appliqué aux réseaux locaux : conception des champs, rôle du contrôle d'accès au média et conformité aux règles IEEE 802.2 pour l'interprétation des couches supérieures.
Rôle de la couche Liaison dans l'encapsulation
La couche Liaison encapsule les paquets de la couche Réseau en trames avant leur transmission sur le support physique. Cette encapsulation ajoute en‑têtes et champs de contrôle (adresses MAC, EtherType, FCS) nécessaires pour l'acheminement et la vérification des données. En pratique, le protocole couche liaison influence la latence, la fiabilité et la gestion de la congestion des trames réseaux dans les architectures industrielles, et s'inscrit dans la chaîne de la liaison de données.
💡 Pourquoi choisir ce cours ?
Document rédigé par Thierry VAIRA, centré sur les mécanismes essentiels de la couche Liaison appliqués aux réseaux de terrain. Approche méthodologique basée sur exemples industriels et mesures chiffrées : comparaisons pratiques (Ethernet, CAN, FIP, Modbus, AS‑i), distinctions MAC/LLC, critères d'arbitrage et illustrations par Hamming et polynômes CRC pour faciliter l'évaluation opérationnelle d'un bus.
👤 À qui s'adresse ce cours ?
- Public cible : ingénieurs et techniciens réseaux et automatisme intervenant sur bus de terrain et réseaux locaux industriels (intégration, conception d'architectures temps réel, maintenance).
- Prérequis : connaissance du modèle OSI, représentation binaire, opérations bit à bit, notions de trame Ethernet et principes de base des réseaux locaux.
❓ Foire Aux Questions (FAQ)
Comment le bus CAN réalise‑t‑il un arbitrage non destructif lors d'émissions simultanées ? Le bus CAN utilise une logique de bus « ET câblé » où l'état dominant (0) écrase l'état récessif (1). L'arbitrage s'effectue bit à bit : un émetteur qui observe une différence entre le bit envoyé et l'état du bus cesse l'émission sans perturber les autres, garantissant priorité et déterminisme.
Quels sont les apports respectifs des CRC et de la distance de Hamming pour la détection d'erreurs ? La distance de Hamming fixe la borne théorique de détection (un code de distance HD détecte jusqu'à HD‑1 erreurs). Le CRC, réalisé par une pseudo‑division par un polynôme générateur (ex. CRC‑16, CRC CCITT V41), fournit une méthode pratique de détection pour les trames ; son efficacité dépend du choix du polynôme et des motifs d'erreur visés.